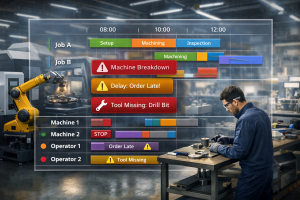
ORDOPTIM: Make the machining schedule more robust against hazards
ORDOPTIM is a feasibility study focused on an SLB machining workshop combining automated cell and manual operations. The project objectified the limits of the current scheduling and defined a realistic functional target for more anticipative, more reactive planning and better aligned with field constraints.