SUSTAINABLEPRODSCORE: Methodology for environmental and social assessment of mechanical processes

The SustainableProdScore project has developed a methodology for assessing social and environmental impacts applicable to production equipment, to test the relevance and feasibility of carrying out a social life cycle analysis related to an industrial process and to obtain through environmental life cycle analyses the main contributors for the studied processes. A tool for modeling environmental and ultimately also social impacts is being finalized and tested.
SMARTWATER: Reducing and controlling water use in manufacturing

The SmartWater project was aimed at reducing and controlling water consumption depending on the activity of the manufacturing site and supply restrictions in case of drought, in order to achieve more responsible water management.
PREHDIGIT: Demonstration of multi-finger robotic gripping

The PREHDIGIT project aims to demonstrate the contribution of multi-finger modular grippers that can adapt to different loads and shapes, to automate and allow the use of cobots in some industrial manipulation and handling tasks. By combining advanced mechatronics and teaching strategies, these systems aim to optimise productivity, heighten safety and improve quality, while making operators’ work less strenuous. The project focuses on the validation of their modularity and compliance with current manufacturing requirements.
COGEFLUX: Control of ambient temperatures in buildings
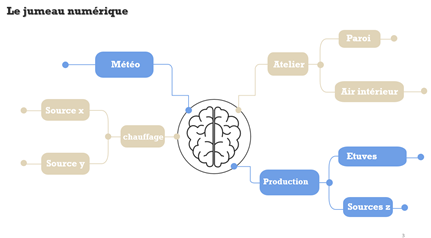
The COGEFLUX project has led to the definition and validation of a method for optimising thermal comfort on the basis of energy consumption data from production workshops. The three use cases selected for control and prediction via an energy digital twin brought out valuable potential energy savings (of about 10%).
INTUIPROG: Intuitive programming to assist automatable tasks
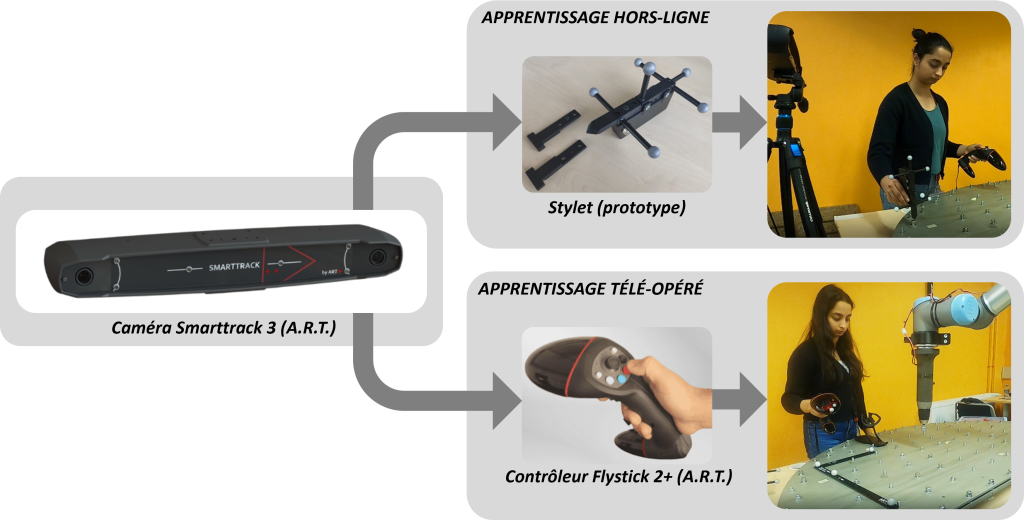
As part of the FactoryLab INTUIPROG project, the CEA laboratory (SRI/LCSR) has developed an intuitive and interactive programming solution based on the use of motion capture combined with assistance functions to make teaching easier, and allow repetitive tasks to be handled automatically by robots. This solution is compatible with different robot makes and models through a standardisation layer. The INTUIPROG solution allows operators and non-robotics specialists to define and start small robotic assistance tasks online. It takes the form of a software suite named SPIRE2, associated with motion capture hardware.
PRECINET: Internal cleanliness inspection of piping
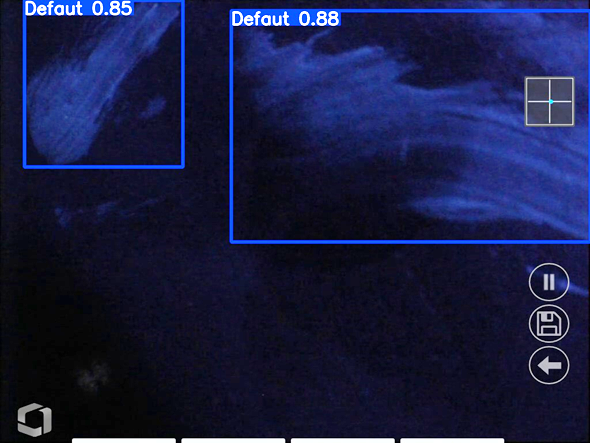
The PRECINET feasibility study is aimed at testing the approach of using artificial intelligence to detect pollution (grease and loose parts) in industrial piping, along with the possibility of incorporating AI into a video endoscope available in the market.
ERGOHAND: Interaction measurement glove

The project involved the creation of a tool that can measure the interaction between a human hand and the environment.
It led to the development of the multiphysics instrumentation of a glove and tests in operating conditions.
RACOSOUD: Determining the quality indicators of a welded joint based on the physical values recorded during welding

As part of the RACOSOUD project, high-performance tools for data processing, including those incorporating AI-based models, have been used in order to use the physical measurements collected during the welding process. The study was devoted to the resistance welding process.
AUTO RX: Automatic detection of indications on X-ray images
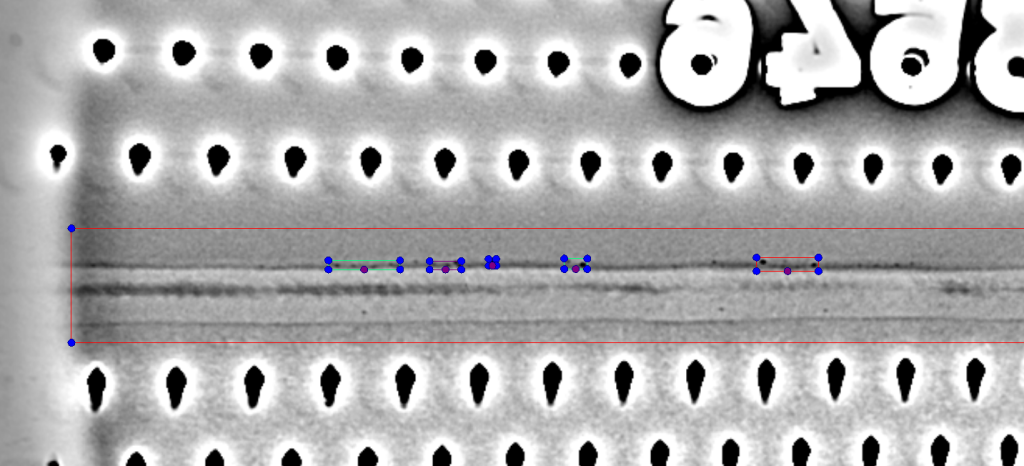
The AUTO RX feasibility study is aimed at testing several approaches for putting in place a system that uses artificial intelligence to assist decisions based on digital X-ray images. The study compares two techniques adapted to limited image bases with a standard approach.
ASSISROB: SybXL, design, innovation and challenge of a heavy payload cobot
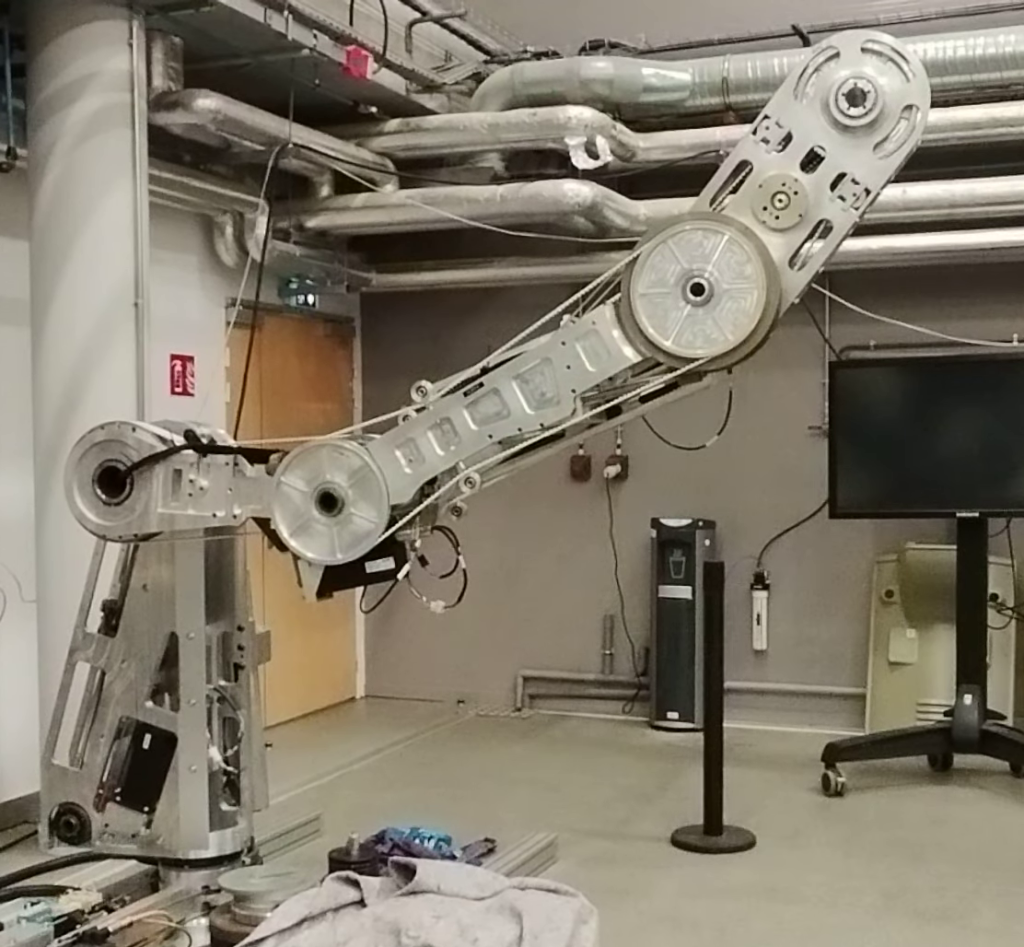
Designed to address the need for a collaborative robot that can handle heavier loads than those available in the market, SybXL is an innovative heavy payload (35 kg) cobot that is the result of collaboration between CEA-List and industry. While not all the challenges relating to the design of such a cobot have been met to date, major scientific advances have been made, such as a double-acting cable cylinder which synchronises the axes or a balancing system with multiple springs.