ORDOPTIM : Rendre l’ordonnancement d’usinage plus robuste face aux aléas

ORDOPTIM est une étude de faisabilité centrée sur un atelier d’usinage SLB combinant cellule automatisée et opérations manuelles. Le projet a objectivé les limites de l’ordonnancement actuel et a défini une cible fonctionnelle réaliste pour une planification plus anticipative, plus réactive et mieux alignée sur les contraintes terrain.
COPILIO : Copilotes IA pragmatiques pour les métiers industriels

COPILIO évalue comment l’IA générative et les modèles de langage peuvent devenir des assistants opérationnels en environnement industriel, avec un focus sur la fiabilité, la souveraineté et le passage à l’échelle. Le projet aboutit à des scénarios concrets, des choix d’architecture et des repères de coûts pour lancer des preuves de valeur.
SUSTAINABLEPRODSCORE : Méthodologie d’évaluation environnementale et sociale des procédés mécaniciens

Le projet Sustainable Prod Score a permis d’élaborer une méthodologie d’évaluation d’impacts sociaux et environnementaux applicables à des équipements de production, de tester la pertinence et la faisabilité de réalisation d’une analyse sociale de cycle de vie rapportée à un procédé industriel et d’obtenir à travers les analyses environnementales de cycle de vie les principaux contributeurs pour les procédés étudiés. Un outil de modélisation des impacts environnementaux et à terme également sociaux est en cours de finalisation et de test.
SMARTWATER : Réduire et maîtriser l’usage de l’eau dans l’industrie manufacturière

Le projet SmartWater a eu pour but de réduire et de maîtriser la consommation en eau en fonction de l’activité du site industriel et des contraintes d’alimentation en cas de sécheresse dans le but d’avoir une gestion plus sobre et responsable de l’eau.
PREHDIGIT : Démonstration de préhension robotique pluridigitale

Le projet PREHDIGIT vise à démontrer l’apport de préhenseurs modulaires pluridigitaux, capables de s’adapter à diverses charges et formes, pour automatiser et cobotiser certaines tâches industrielles de manipulation et de manutention. En combinant mécatronique avancée et stratégies d’apprentissage, ces systèmes visent à optimiser la productivité, renforcer la sécurité et améliorer la qualité, tout en réduisant la pénibilité pour les opérateurs. Le projet se concentre sur la validation de leur modularité et conformité aux exigences industrielles actuelles.
COGEFLUX : Pilotage des ambiances thermiques des bâtiments
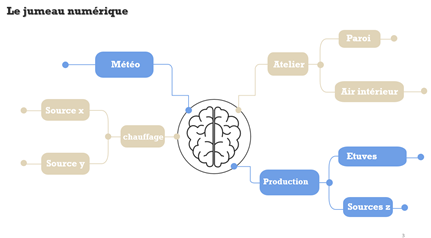
Le projet COGEFLUX a permis de définir et valider une méthodologie d’optimisation du confort thermique en s’appuyant sur les données de consommation énergétique des ateliers de production. Les trois cas d’usage mis en œuvre en terme de pilotage et de prédiction via un jumeau numérique énergétique ont montré des potentiels de gains énergétiques intéressants (de l’ordre de 10%).
INTUIPROG : Programmation intuitive pour assistance aux tâches automatisables
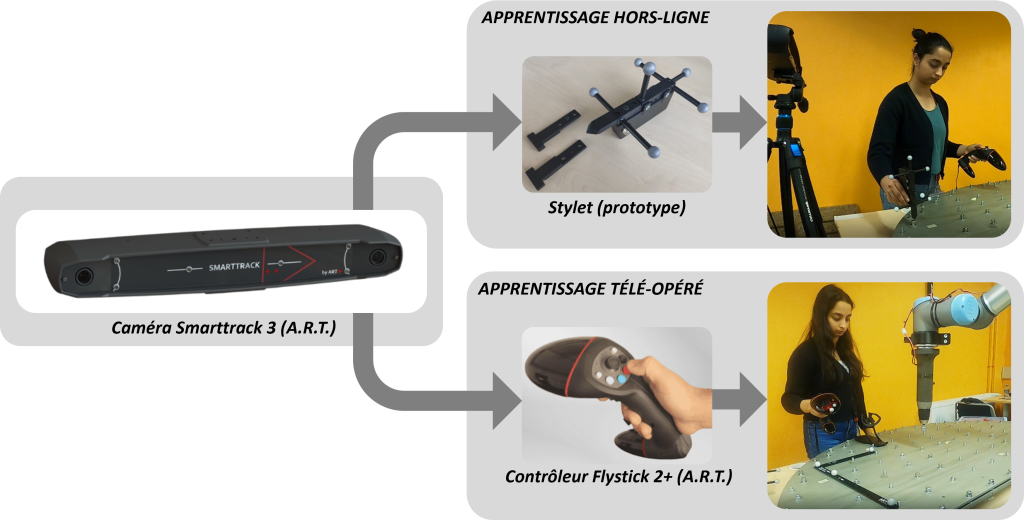
Dans le cadre du projet FactoryLab INTUIPROG, le laboratoire du CEA (SRI/LCSR) a développé une solution de programmation intuitive et interactive, basé sur l’usage du motion-capture, combiné à des fonctions d’assistance permettant de faciliter l’apprentissage, et permettant le traitement automatique de tâches répétitives par la robotique. Cette solution est compatible avec différentes marques et modèles de robots, via une couche de standardisation. La solution INTUIPROG permet de configurer et déclencher en ligne de petites tâches d’assistance robotique à destination des opérateurs ou des non-roboticiens. Elle prend la forme d’une suite logicielle, nommée SPIRE2, associée à du matériel de motion capture.
PRECINET : Contrôle interne de la propreté de tuyauterie
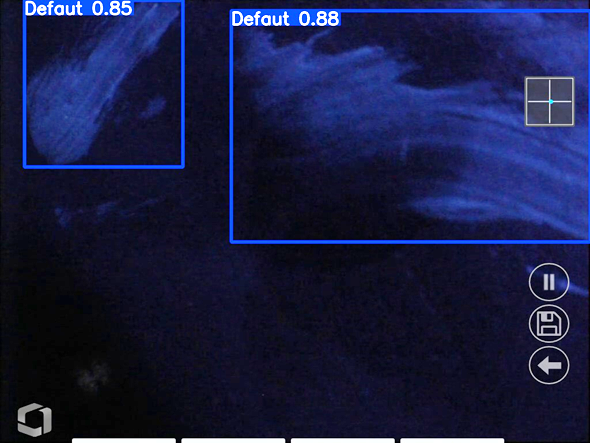
L’étude de faisabilité PRECINET vise à tester l’approche de détection par intelligence artificielle de pollutions (graisse et corps migrants) dans des tubulures industrielles, ainsi que la possibilité de l’intégration de l’IA dans un vidéo-endoscope du marché.
ERGOHAND : Gant de mesure d’interaction

Le projet porte sur la création d’un outil permettant de mesurer l’interaction des mains d’un humain avec son environnement.
Une instrumentation multiphysique d’un gant et des essais en conditions opérationnelles ont été réalisés au cours du projet.
RACOSOUD : Déterminer des indicateurs de la qualité d’un assemblage soudé à partir de grandeurs physiques enregistrées en cours de soudage

Dans le cadre du projet RACOSOUD, des outils performants de traitements de la donnée, y compris intégrant des modèles basés sur l’intelligence artificielle, ont été utilisés afin d’exploiter des mesures physiques recueillies en cours de soudage. L’étude a été consacrée au procédé de soudage par résistance.