Projet réalisé dans le cadre du Consortium industriel FactoryLab avec le CETIM, Naval Group et SLB.

Contexte
La présence de polluant en interne de tubulures industrielles peut entraîner des perturbations sur le flux de production voire des défaillances lorsque ces polluants se retrouvent à gêner une étape d’assemblage (collage ou soudage), il est ainsi important de les détecter et de positionner au plus tôt de manière à traiter ces anomalies.
L’inspection interne de tubulure par vidéo-endoscopie a déjà été réalisée pour la détection manuelle lors d’un projet FactoryLab précédent (GREASE), ce qui a fait émerger un besoin de détection automatisé sur flux vidéo. Le caractère complexe des données de contrôle par vidéo-endoscopie a poussé le CETIM à faire le choix d’implémenter une méthode de détection ayant recours à un modèle d’intelligence artificielle (IA).
L’objectif principal de cette étude est de mettre au point une solution de détection automatique de pollution pouvant être présentes dans des tuyauteries industrielles. Ces pollutions seront détectées via une méthode de vidéo-endoscopie. La détection automatique sera faite au moyen d’un modèle d’intelligence artificielle.
Cas d’usage et étapes du projet
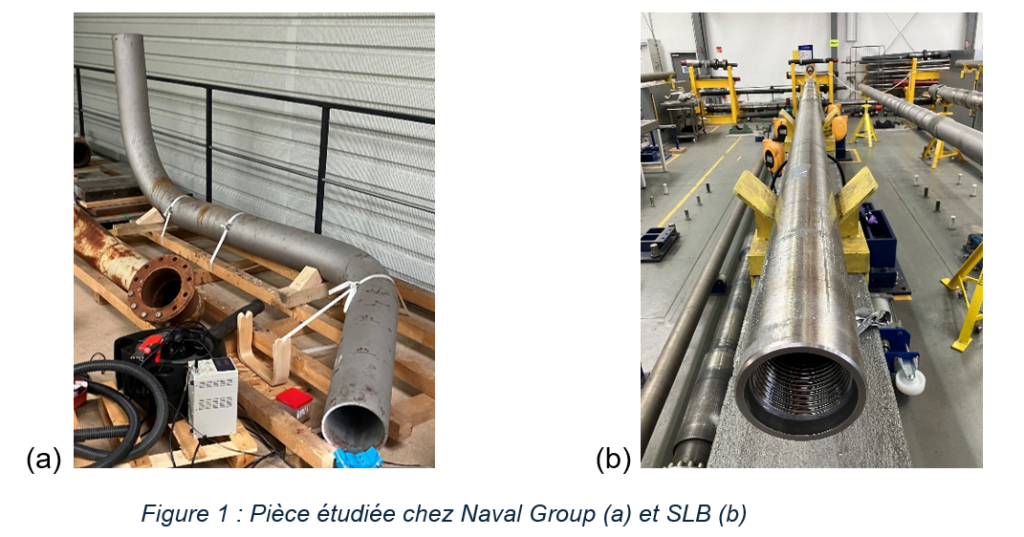
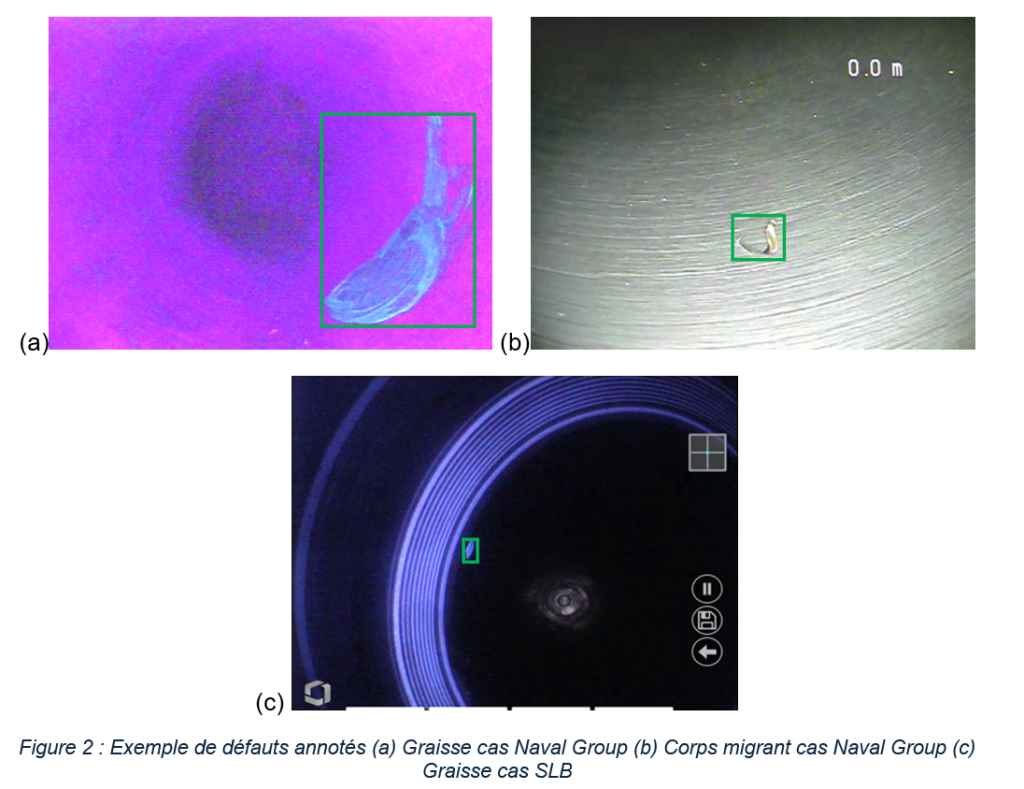
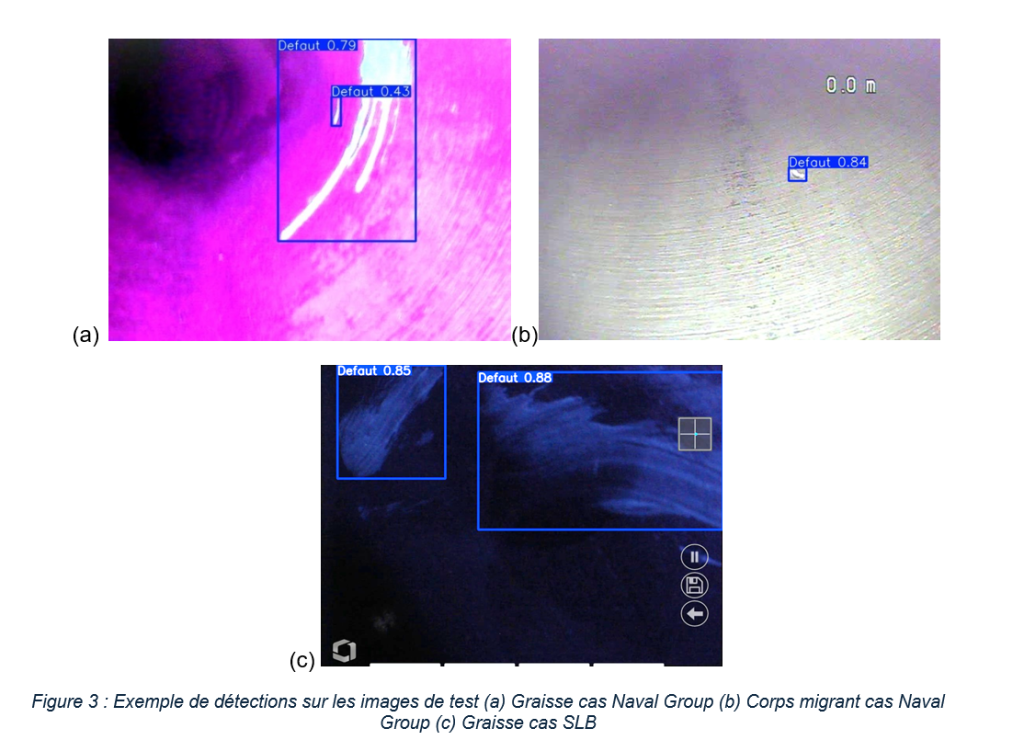
L’étude a été mené sur deux cas d’usage : une tuyauterie coudée en acier de chez Naval Group, et des pièces appelées collars de chez SLB, entrant dans la conception de matériels de sondage souterrain. Dans les deux cas, l’objectif est de détecter la graisse présente dans le tube sous éclairage UV, tandis que pour la pièce Naval Group, on souhaite également pouvoir détecter la présence de corps migrants (fil de pêche, copeaux et outils) sous lumière blanche.
Afin de mener à bien ce projet, il a été dans un premier temps nécessaire de réaliser des banques d’images sur des cas d’application fixes et destinées à l’entraînement de modèles. Une annotation manuelle (c’est-à-dire indiquer où se trouvent précisément les défauts) a été réalisée sur l’ensemble des images avec indications pour permettre l’entraînement de l’algorithme.
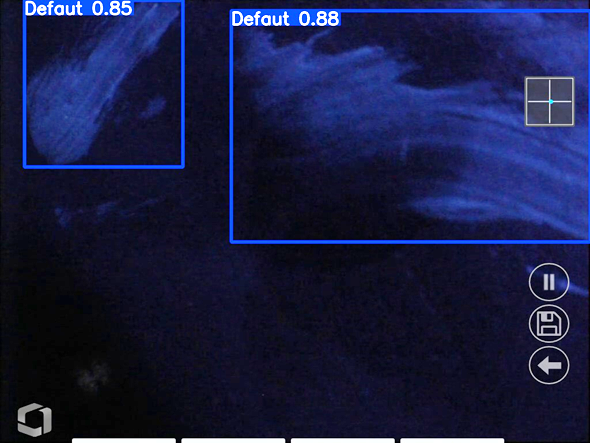
L’entraînement des algorithmes a finalement pu être réalisé, ainsi que leur intégration sur les appareils de vidéo-endoscopie, soit directement en réalisant la détection sur l’appareil (ce qui n’est pas optimal en termes de temps de détection étant donné que l’endoscope utilisé n’est pas assez puissant), ou en dérivant le flux vidéo sur un ordinateur et en réalisant la détection dessus, ce qui a été préféré pour les essais en conditions réelles.
Résultats
Les algorithmes entraînés sur les différents cas d’usage ont ensuite été testés sur une partie de la base de données non utilisée durant l’entraînement, ainsi qu’en conditions réelles pour Naval Group. Les résultats de détection obtenus sont intéressants, de 80% à 93% de bonnes détections selon le cas d’usage, et moins de 10% de faux positifs sur des images saines.
Conclusion & perspectives
L’étude a mis en évidence la pertinence de l’approche de détection par intelligence artificielle de pollutions, cette approche ayant permis d’obtenir de bons résultats sur les différents cas d’usage étudiés, ce qui pourrait permettre d’aider le contrôleur durant son inspection.
Au cours de l’étude, des pistes d’améliorations ont été identifiées : tout d’abord, il serait intéressant d’essayer d’intégrer l’algorithme sur un vidéo-endoscope plus récent et puissant que celui utilisé durant le projet, pour tester une détection en temps réel directement sur l’appareil. Si ce n’est toujours pas le cas, plutôt que de réaliser la détection sur un ordinateur, il serait plus adapté à une intégration industrielle de la réaliser sur un micro-ordinateur de type Nvidia Jetson. Une classification des pollutions détectées pourrait aussi être envisagé. En effet, actuellement toutes les pollutions sont de la même classe « défaut », et il serait possible d’être plus précis, avec une classe par type de défaut (par exemple pour Naval Group « fil de pêche », « copeau », « outil »).
Auteur : Antoine VALENTIN, chef de projet PRECINET, CETIM.