Projet réalisé dans le cadre du Consortium industriel FactoryLab avec les expertises croisées du CEA-List, du CETIM et de l’ENSAM-Lille en collaboration avec Isybot, Dassault Systemes, Actemium, Safran, Naval Group, Stellantis, TechnipFMC, Vinci Construction et Bureau Veritas.

Contexte : La cobotique, une approche centrée sur l’humain
La cobotique, ou robotique collaborative, place la collaboration entre les robots et les humains au cœur de son fonctionnement. Contrairement aux robots traditionnels qui opèrent de manière isolée dans des environnements séparés, les robots collaboratifs sont conçus pour travailler main dans la main avec les opérateurs, dans un même espace de travail. Cette interaction étroite et sécurisée vise à améliorer les conditions de travail des opérateurs en réduisant la pénibilité des tâches et en diminuant les risques de maladies professionnelles, notamment les troubles musculo-squelettiques (TMS).
L’objectif est de soulager les travailleurs des tâches répétitives, pénibles ou dangereuses, tout en leur permettant de se concentrer sur des activités à plus forte valeur ajoutée. En prenant en charge les efforts physiques importants ou répétitifs, les cobots aident à prévenir les TMS et améliorent les conditions de travail. De plus, la cobotique peut contribuer à améliorer la qualité du travail en réduisant les erreurs et en augmentant la précision et la répétabilité des opérations.
Présente dans divers secteurs comme la fabrication, la logistique et la santé, la cobotique est le chaînon manquant entre l’automatisation et le travail purement manuel. Elle promeut une approche plus inclusive et synergique, où l’humain et la machine collaborent pour atteindre une efficacité et une sécurité optimale. L’accent est mis sur la complémentarité entre l’homme et le robot, le cobot devenant un outil qui augmente les capacités de l’opérateur et non un remplaçant.
Exemple concret : le cobot Isybot, issu des recherches du CEA-List, illustre parfaitement cette approche centrée sur l’humain. Conçu pour renforcer la compétitivité et l’attractivité des postes manuels, il améliore la productivité tout en réduisant la fatigue de l’opérateur sans modifier son environnement. Grâce à ses qualités mécaniques uniques et brevetées, Isybot apporte compétitivité et attractivité aux tâches non automatisées et imprévisibles. Les cobots interactifs améliorent la productivité tout en réduisant la fatigue de l’opérateur. Le cobot actuel, SYB 3, a une portée de 1,6 m, une charge utile de 10 kg et 4 modes de fonctionnement : assistance, restitution, parallélisation ou commande à distance. Sans formation particulière, l’opérateur intègre et optimise l’utilisation du cobot en valorisant son savoir-faire.
Enjeux
Le but du projet ASSISROB est d’augmenter la capacité de charge du robot collaboratif Isybot pour atteindre 35 kg. Il existe sur le marché peu de cobots avec une telle capacité de charge. Cette capacité en effort doit permettre de prendre en compte un nombre important de cas d’usage des end-users FactoryLab.
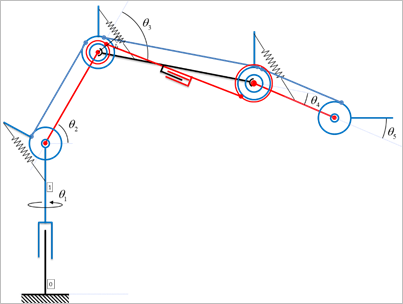
Pour répondre aux contraintes d’un maximum d’utilisateurs, les concepteurs sont arrivés à un concept où l’axe 3 du robot est constitué de 2 segments couplés (voir ci-dessous).
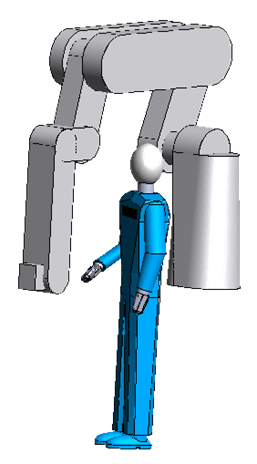
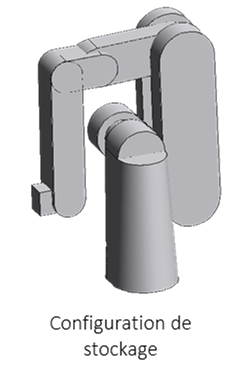
L’objectif était de limiter le nombre d’axes pilotés à 3, à l’image du Syb 3, afin de minimiser le coût et la complexité de l’électronique, tout en minimisant l’encombrement du robot une fois replié. Ce faible encombrement permettrait au robot de passer par des portes d’atelier standard, dans la plupart des ascenseurs et sur les nacelles, afin d’autoriser une grande mobilité et la possibilité de travail dans des situations très diverses. Une fois déplié, le robot possède un rayon d’action de 2 m.
Innovations
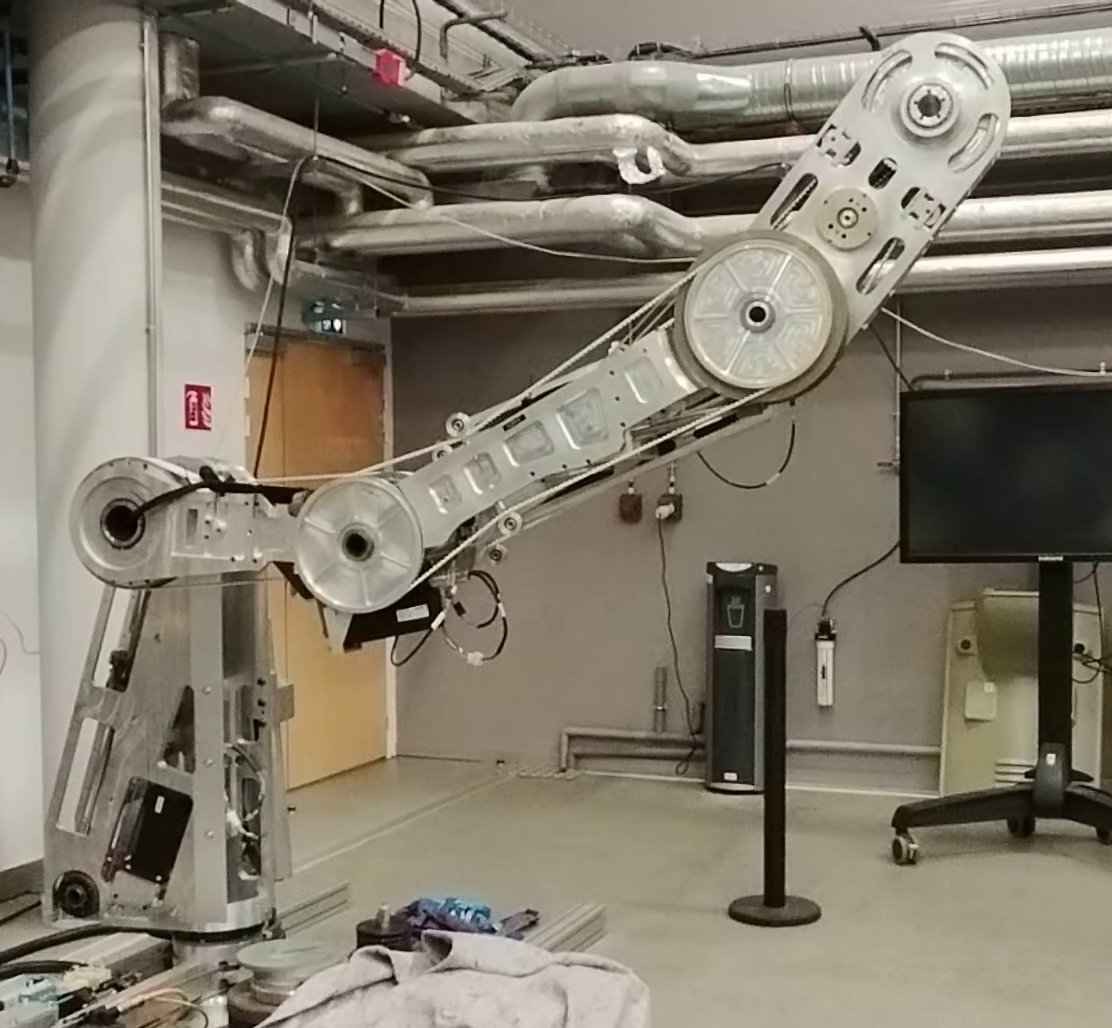
Le robot a été conçu et réalisé. Il fonctionne en mode robot et a un encombrement réduit une fois replié. Un modèle complet du robot, incluant les frottements, a été développé et validé. Les paramètres principaux ont été identifiés. Grace à cette conception, le robot peut se replier dans l’encombrement d’une palette, et a une hauteur réduite une fois replié. Malgré ces contraintes, l’espace de travail est très important.
Par contre, le robot n’est pas facile à manipuler en mode cobot. Il a tendance à se mettre en position singulière (une position singulière pour un robot se produit lorsqu’il atteint une configuration où il perd une partie ou la totalité de sa mobilité. En conséquence, le robot peut rencontrer des difficultés à atteindre ou à quitter cette position de manière fluide), ce qui rend la manipulation de certains axes difficile.
Le SybXL se distingue par son architecture innovante qui lui confère compacité et performance. Le vérin à câble à double sortie joue un rôle crucial en coordonnant cinématiquement les axes 3 et 4, permettant ainsi de ne piloter que 3 axes tout en conservant une grande amplitude de mouvement. Ce système, composé d’une transmission à câble pour synchroniser les deux axes et d’un actionneur à câble pour fournir les efforts nécessaires, est l’élément clef pour la réduction de l’encombrement du robot une fois replié.
Pour assurer l’équilibre du bras (voir modèle cinématique ci-dessous), le SybXL utilise la solution classique de plusieurs parallélogrammes à courroies en série. Par ailleurs, un système d’équilibrage à ressorts est mis en place sur 3 axes. Ce choix de conception, reposant sur des groupements séries et parallèles, permet de diminuer la masse du robot (les ressorts sont plus légers que des contrepoids traditionnels). L’incertitude de fabrication des ressorts est prise en compte lors de la conception.
Enfin, l’utilisation de vérins de forte capacité permet au SybXL de supporter une charge utile accrue, répondant ainsi aux besoins des utilisateurs finaux.
Résultats et Perspectives
Le développement d’un robot collaboratif de forte puissance à axes synchronisés reste un challenge scientifique complexe. Le SybXL étudié lors du projet ASSISROB présente une forte capacité en efforts avec un encombrement maîtrisé. Ce travail a permis d’aborder un domaine nouveau et qui permettra d’étendre les capacités des cobots à une plus grande autonomie et un vrai mode robot.
Néanmoins, il s’est avéré lors des essais que la transparence est insuffisante dans certaines configurations. L’axe 3-4 a tendance à se mettre spontanément en configuration singulière, ce qui gêne considérablement la maniabilité sur cet axe. L’ergonomie résultante en est fortement dégradée.
Ce projet a néanmoins permis des avancées scientifiques majeures :
- le travail sur l’équilibrage a permis d’améliorer les connaissances sur les incertitudes des ressorts;
- le développement d’un actionneur de type vérin à câble à double sortie, permettant de synchroniser 2 axes de manière élégante;
- enfin, une méthodologie pour identifier séparément les paramètres de la machine sans démontage a été développée et mise en œuvre.
Auteur : Frédéric COLLEDANI, chef de projet ASSISROB, CEA-List.