Projet réalisé dans le cadre du Consortium industriel FactoryLab avec le CEA-List, le CETIM, FINRIP, STELLANTIS, SAFRAN, NAVAL GROUP et SLB.

Contexte
L’industrie ne dispose actuellement pas de préhenseurs modulaires à capacité de charge variable. Jusqu’à présent, l’automatisation était essentiellement dédiée à la production de grande série, principalement pour des tâches répétitives. La manipulation des pièces s’effectuait à l’aide de préhenseurs spécifiques, conçus pour une seule fonction.
Aujourd’hui, une transformation opérationnelle s’opère dans les usines : la production doit être capable de s’adapter à une grande diversité de pièces (en termes de formes, géométrie et poids), tout en restant rapidement reconfigurable, notamment pour les petites et moyennes séries spécialisées. Cette évolution s’accompagne d’exigences accrues en matière de vitesse, de compétitivité, de durabilité et de qualité.
- STELLANTIS : manipulation de renforts de pavillons, de portières, préparation de kits pour boites à vitesses, …
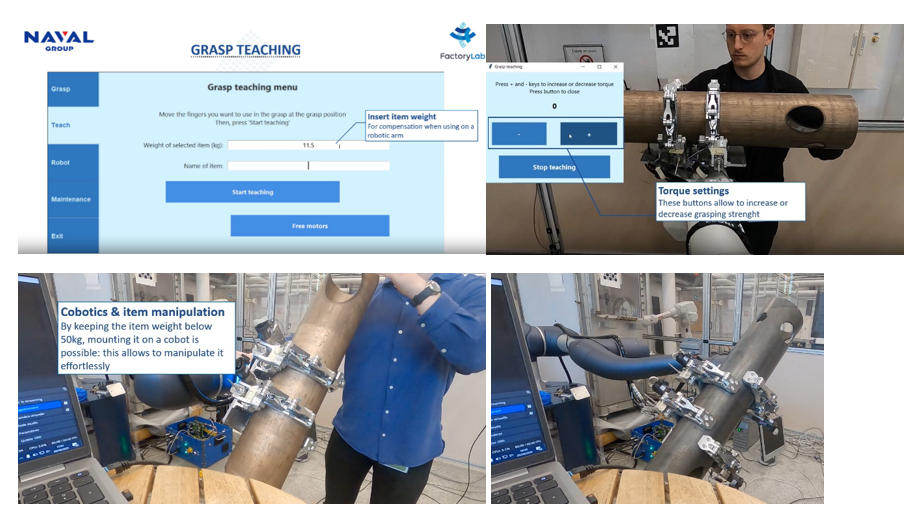
- NAVAL GROUP : maintien de tubes aux dimensions et formes variées pendant les opérations de soudage, …
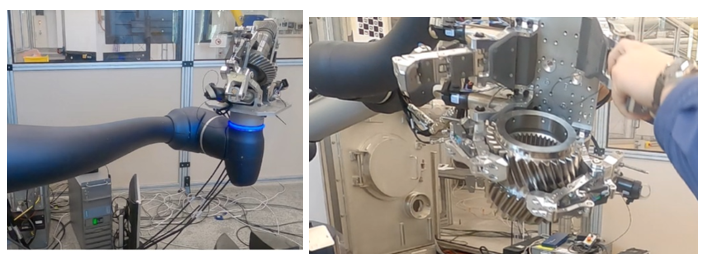
- SAFRAN : maintien de pièces de moteurs en production, manipulation de sous-ensembles de moteurs en phase de tests et outils d’aide lors de la maintenance des moteurs sur le tarmac, maintien de pignons, …
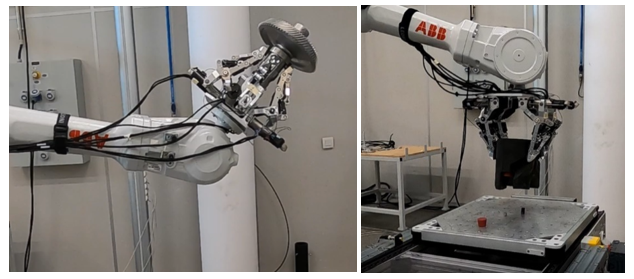
- SLB : manipulation et retournement de pièces en acier, atelier de fabrication mécanique, formes variées, fortes charges, …
Enjeux & innovation
L’enjeu principal consiste à démontrer l’apport d’une préhension robotique pluridigitale des objets concernés par les cas d’usage identifiés dans l’étude. Pour cela, la société FINRIP propose de développer une gamme standard et modulaire de doigts et de préhenseurs pluridigitaux, capables de saisir une large variété d’objets, depuis les charges légères (< 1 kg) jusqu’à plusieurs dizaines de kilogrammes. L’objectif est de répondre aux besoins spécifiques de la préhension industrielle pour robots et cobots, en s’adaptant à un grand nombre de contextes et d’applications industrielles variées.
Dans le cadre du projet PREHDIGIT, les préhenseurs intégreront des prototypes de doigts robotisés sous-actionnés à trois phalanges, basés sur les premières architectures mécaniques développées par le CEA-LIST.
L’objectif est de valider que cette approche conceptuelle réponde pleinement aux attentes et exigences des utilisateurs industriels finaux, notamment en termes de modularité, flexibilité, ergonomie, sécurité, conformité aux normes et facilité d’intégration.
Cette innovation permet ainsi d’automatiser et/ou de cobotiser les tâches en proposant un système capable de :
- collaborer efficacement avec les opérateurs, grâce à des modes de fonctionnement intelligents basés sur l’apprentissage.
- fonctionner en mode entièrement automatique.
A terme, l’impact sur les usages industriels devra se traduire par une augmentation significative des performances opérationnelles (productivité accrue, assemblages plus précis, réaffectation des opérateurs à des tâches à plus forte valeur ajoutée), une sécurisation renforcée des opérations, une amélioration de la qualité, ainsi qu’une réduction de la pénibilité grâce à une manipulation sans effort pour l’opérateur.
Résultats
Un prototype de préhenseur, basé sur des paumes interchangeables intégrant des doigts modulaires FINRIP, a été conçu et intégré dans un démonstrateur installé dans les locaux du CEA-LIST. Le succès des démonstrations a validé la pertinence des approches mécatronique et de contrôle-commande retenues pour la conception des doigts robotiques modulaires, ainsi que celle du préhenseur dans son ensemble.
Par ailleurs, le CETIM a apporté son expertise en matière de sécurité, contribuant à orienter les futurs développements afin de garantir la conformité de la prochaine gamme de doigts de la société FINRIP aux exigences de sécurité, notamment en lien avec la perception, l’actionnement, la structure et l’organe de contrôle-commande.
Perspectives
La prise en compte des exigences de sécurité dans la conception et la commande du préhenseur constitue l’une des perspectives à court terme de ces travaux.
Conclusion
Les prototypes robotiques de préhension développés dans le cadre du projet PREHDIGIT ont pleinement répondu aux exigences des cas d’usage représentatifs fournis par les partenaires End-Users. Ce projet a constitué une étape cruciale pour la société FINRIP, en permettant d’affiner la compréhension des besoins du marché tout en faisant progresser leur produit vers un niveau de maturité technologique (TRL) supérieur.
Auteur : Mathieu GROSSARD, chef de projet PREHDIGIT, CEA-List.